
acontis Options EtherCAT Master
- Protocoles : ETHERCAT
- Produits / Services : Logiciels
- Fournisseur : acontis
Acontis propose plusieurs options conformes aux directives Feature Packs ETG1500 pour sa pile EtherCAT Master.
Mais toutes les applications n'ont pas les mêmes exigences et, par conséquent, chaque maître ne doit pas nécessairement prendre en charge toutes les fonctionnalités offertes par la technologie EtherCAT. EC-Master couvre donc avec les éditions Classe A et Classe B les exigences les plus générales d'un maître EtherCAT, entièrement conformes aux directives ETG1500 pour un maître EtherCAT.
Des fonctionnalités supplémentaires, qui peuvent être nécessaires pour des utilisations étendues de la technologie EtherCAT dans les contrôleurs, les usines et les machines, sont décrites par des Feature Packs dans la directive ETG1500.
Considérées comme optionnelles, ces fonctionnalités sont proposées par acontis sous forme de Feature Pack, conformes aux directives ETG. EC-Master couvre ainsi tous ces Feature Packs et fournit même des fonctionnalités au-delà de celles officiellement définies. Cette page donne un aperçu des « Feature Packs » disponibles et des cas d'utilisation respectifs.
Split-Frame Processing (traitement séparé des trames)

EC-Engineer facilite la création de configurations avec plusieurs tâches cycliques.
Synchronisation Externe
- Synchronisation avec une horloge maitre externe utilisant le protocole IEEE 1588
- Synchronisation par un pont.
Cependant, si deux ou plusieurs réseaux gérant des contrôles de mouvement doivent être synchronisés, il peut être nécessaire que les signaux de synchronisation soient parfaitement alignés dans tous les dispositifs (par exemple pour une information de commutation à l'échelle du réseau) – ce qui nécessite une précision souvent supérieure à la microseconde.
Au sein d'un segment EtherCAT, le mécanisme des horloges distribuées (Distributed Clocks) peut être utilisé pour synchroniser les appareils du réseau. Les horloges distribuées offrent une précision bien meilleure qu'une microseconde.
Le premier dispositif qui doit être synchronisé est utilisé comme horloge de référence pour ce segment.
La synchronisation de plusieurs segments EtherCAT avec une grande précision signifie que les horloges distribuées de référence dans les segments doivent être ajustées.
L'horloge de référence est appelée horloge maitre (Grandmaster). Elle peut être une information horaire externe, par exemple un récepteur GPS ou DCF77, mais aussi être l'une des horloges de référence DC.
Hot Connect (connexion en fontionnement)

Ainsi, les cas d'utilisation supplémentaires suivants peuvent être couverts (sans qu'il soit nécessaire de modifier le fichier de configuration ENI) :
- Mise en place d'un système de contrôle complexe, alors que certaines parties du système ne sont pas disponibles, mises hors tension ou déconnectées.
- Exploitation d'un système composé de dispositifs obligatoires et optionnels (par exemple, dans un environnement de test et de mesure)
- Flexibilité dans le câblage : les esclaves peuvent être connectés à différents ports (par exemple, analogique à CAN).
Chaque groupe HC doit juste être identifiable de manière unique, le plus souvent en utilisant des commutateurs DIP.
Le "Hot Connect" Feature Pack nécessite au moins la version 2.0 de la pile EC-Master.
Redondance de câbles (Cable Redundancy)
Un deuxième port réseau est utilisé pour la fermeture de l'anneau au niveau du système de contrôle principal d'EtherCAT. Les trames cycliques et acycliques sont envoyées simultanément par les deux ports, et sont transportées par le système.

En l'absence de défaut, tous les esclaves EtherCAT sont accessibles depuis le port secondaire dans le sens inverse - les données dans la trame de "redondance" ne sont donc pas modifiées.
Dans chaque cas, les trames EtherCAT arrivent, éventuellement modifiées, à l'autre port, et sont vérifiées par le maître EtherCAT. En cas de rupture de câble, les deux trames sont traitées - chacune du côté respectif de la panne. Les deux trames contiennent donc une partie des données d'entrée. Le maître doit combiner les données des deux trames, et obtient une trame avec toutes les données d'entrée. Les compteurs de travail des deux trames sont ajoutés pour vérifier leur validité. Il n'est pas important de savoir si un esclave EtherCAT est atteint à partir du port primaire ou du port de redondance. Le maître EtherCAT doit considérer qu'une trame d'un côté est perdue et que l'autre revient. Pour trouver la trame correspondante, il est utile de marquer les trames avec une identification ou d'utiliser un mécanisme approprié.
La redondance du câble est tolérante à une seule erreur, c'est-à-dire que la communication avec les esclaves peut continuer si le câble est interrompu à un endroit. Lorsque la communication est rétablie, la direction de communication originale est rétablie.
Redondance de Maître (Master Redundancy)

Le maître de sauvegarde Iinactif a accès à toutes les données de processus. Il analyse et modifie les trames reçues et ajoute lui-même des trames après les trames esclaves cycliques. Le maître de sauvegarde actif et le maître de sauvegarde inactif peuvent communiquer entre eux en utilisant Ethernet-over-EtherCAT (EoE).
La redondance de câble peut être combinée avec la redondance de maître, le maître actif communiquant directement avec un segment du réseau esclave EtherCAT et indirectement avec l'autre segment du réseau esclave EtherCAT par l'intermédiaire du maître de sauvegarde INACTIF.
Ethernet over EtherCAT (EoE)

Passerelle UDP (UDP Mailbox Gateway)
Produits associés

acontis EC-Master
La pile EC-Master est conçue et optimisée pour fonctionner sur différents systèmes d'exploitation temps réel embarqués. Certaines implémentations sont déjà disponibles : Linux (avec et sans temps réel), Windows® 7/8/10, VxWorks, QNX, RTX, INtime®, Integrity, Xenomai, On Time RTOS-32, RTEMS, FreeRTOS, eCos, TI- RTOS, T-Kernel ainsi que d’autres systèmes d'exploitation. La pile EtherCAT peut aussi être portée sur n'importe quel autre système d'exploitation embarqué.
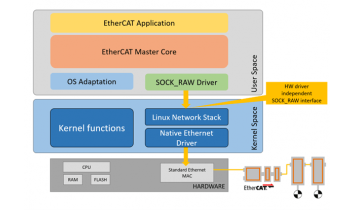
acontis EtherCAT Master pour Linux
acontis propose une solution EC-Master pour Linux permettant des performances temps réel sans compromis.

acontis EC-Engineer
Configuration et diagnostic de réseau EtherCAT®
L'EC-Engineer est un outil logiciel puissant utilisé pour la configuration et le diagnostic des réseaux EtherCAT®. Il permet de gérer toutes les tâches d'ingénierie et de diagnostic de manière rapide et confortable. L'interface utilisateur moderne, claire et très intuitive, utilisant peu de boîtes de dialogue contextuelles, est optimisée pour une navigation fluide dans la configuration et le diagnostic des systèmes EtherCAT®.