acontis EtherCAT Master pour Linux
- Protocoles : ETHERCAT
- Produits / Services : Logiciels
- Fournisseur : acontis
acontis propose une solution EC-Master pour Linux permettant des performances temps réel sans compromis.
EtherCAT et Linux
Compte tenu de ces tendances, l'utilisation d'un EtherCAT Master sous Linux est devenue essentielle dans de nombreuses applications. Mais l'utilisation de Linux présente quelques défis qui doivent être surmontés. Bien qu'il faille tenir compte de la GPL (GNU General Public License) qui apparaît lors de l'utilisation de la technologie brevetée EtherCAT, la performance reste le principal défi technique.
EC-Master d’acontis, stack EtherCAT Master pour Linux
Le logiciel EC-Master prend en charge les architectures Linux x86, x64, ARM, AArch64/ARM64 et PowerPC. En plus de la prise en charge de nombreux processeurs et contrôleurs Ethernet différents, acontis propose des solutions Linux EtherCAT prêtes à l'emploi pour de nombreux contrôleurs différents.
En raison de son évolutivité et de sa conception modulaire, EC-Master peut fonctionner sur des systèmes bas de gamme comme un contrôleur Cortex-M7, ainsi que sur des CPU haut de gamme, comme le Core-i7 d’Intel.
Le code maître est conçu pour fonctionner uniquement dans l'espace utilisateur Linux. Cela permet un processus de développement rapide et pratique et est également conforme à la licence publique générale GNU (GPL). Pour atteindre les taux de mise à jour extrêmement rapides (temps de cycle courts) qui font la réputation d'EtherCAT, la mise en œuvre ne nécessite pas de fonctions de noyau bloquant (API) dans la partie cyclique.
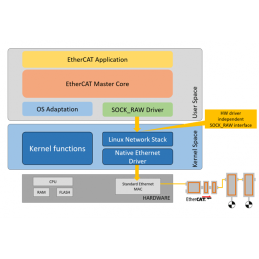
Architecture utilisant le pilote réseau Linux
L'interface « socket » de base étant généralement disponible sur le noyau de chaque distribution Linux, l'application de démonstration précompilée fournie avec EC-Master (EcMasterDemo) prend en charge SOCK_RAW et peut donc être utilisée pour évaluer les fonctionnalités générales de la bibliothèque EC-Master sans avoir à compiler de fichiers pour le système hôte.
Pour certains dispositifs esclaves, comme ceux qui mettent en œuvre et utilisent des horloges distribuées, des contraintes en temps réel doivent être maintenues. Dans ce cas, l'option socket de base n'est probablement pas en mesure d'envoyer et de recevoir des trames assez rapidement, et les dispositifs EtherCAT ne fonctionneront pas correctement. Par conséquent, SOCK_RAW ne doit être utilisé qu'à des fins d'évaluation initiale et doit être remplacé par le pilote temps réel acontis dans une application industrielle.
Architecture avec le pilote temps réel acontis

Le module atemsys est livré avec EC-Master et est mis à jour lorsque EC-Master est mis à jour.
Pilotes Ethernet temps réel disponibles
- Pilote réseau Linux (emllSockRaw) : x86, x64, ARM, AArch64, PPC
- Intel Pro/100 (emllI8255x) : x86
- Intel Pro/1000 (emllI8254x) : x86, x64, ARM, AArch64
- Intel Cyclone V (emllDW3504) : ARM
- Realtek 100MBit (emllRTL8139) : x86
- Realtek Gigabit (emllRTL8169) : x86, x64, ARM, AArch64
- Renesas RZ/G1E (emllSHEth) : ARM
- STMicroelectronics STM32MP1 (emllDW3504) : ARM
- Texas Instruments AM33xx, AM43xx, AM57xx (emllCPSW) : ARM
- Texas Instruments AM33xx, AM57xx (emllICSS) : ARM
- Contrôleur NXP TSEC/eTSEC, LS1021A (emllETSEC) : ARM, PPC
- NXP i.MX6, i.MX7, i.MX8 (emllFslFec) : ARM
- Xilinx Zynq-7000 , UltraScale (emllGEM) : ARM, AArch64
- CCAT Beckhoff (emllCCAT) : x86, x64, ARM
- Nvidia, Jetson TX2 (emllI8254x) : AArch64
Versions et distributions du noyau
Produits associés

acontis EC-Engineer
Configuration et diagnostic de réseau EtherCAT®
L'EC-Engineer est un outil logiciel puissant utilisé pour la configuration et le diagnostic des réseaux EtherCAT®. Il permet de gérer toutes les tâches d'ingénierie et de diagnostic de manière rapide et confortable. L'interface utilisateur moderne, claire et très intuitive, utilisant peu de boîtes de dialogue contextuelles, est optimisée pour une navigation fluide dans la configuration et le diagnostic des systèmes EtherCAT®.

acontis EC-Master
La pile EC-Master est conçue et optimisée pour fonctionner sur différents systèmes d'exploitation temps réel embarqués. Certaines implémentations sont déjà disponibles : Linux (avec et sans temps réel), Windows® 7/8/10, VxWorks, QNX, RTX, INtime®, Integrity, Xenomai, On Time RTOS-32, RTEMS, FreeRTOS, eCos, TI- RTOS, T-Kernel ainsi que d’autres systèmes d'exploitation. La pile EtherCAT peut aussi être portée sur n'importe quel autre système d'exploitation embarqué.

acontis EC-Simulator
Exécutez un contrôleur EtherCAT sur un réseau simulé
L’EC-Simulator virtualise les réseaux EtherCAT® en simulant les esclaves EtherCAT®. Ceci permet d'exécuter les applications maître EtherCAT sans esclave EtherCAT® réel disponible.

acontis EC-Win
EC-Win fournit une plate-forme EtherCAT professionnelle ouverte et temps réel pour les systèmes Windows. Il est ainsi possible de créer des solutions temps réel extrêmement rapides et déterministes basées sur EtherCAT, une technologie de plus en plus populaire. Les applications typiques sont les contrôleurs de mouvement, les contrôleurs PLC ou les applications de mesure en temps réel avec des temps de cycle jusqu'à 20 kHz. Le composant central d'EC-Win est la puissante pile EC-Master qui a été spécialement optimisée pour travailler aussi bien dans un système temps réel qu’avec l’Hyperviseur Windows acontis fiable et éprouvé.