Comment choisir sa pile logicielle EtherCAT ?
Dans cet article de blog, trois différentes piles logicielles EtherCAT Master seront examinées. Pour chaque option et approche, seront présentés les avantages, les inconvénients, les principales différences entre ces 3 piles, ainsi que les coûts réels associés.
Cette comparaison présentera la solution EC-Master d'acontis Technologies ainsi que deux implémentations Open Source : IgH EtherCAT- Master® dans le cadre de l' EtherLab® distribué par IgH et la Simple Open EtherCAT Master ( SOEM ) principalement maintenu par rt-labs .
Ces trois piles EtherCAT sont disponibles sous forme de code source et peuvent être compilées pour différents systèmes d'exploitation et architectures de processeurs. Certaines nécessitant plus d'efforts que d'autres. Mais voyons le résultat de cette comparaison…
Historique/Contexte
La pile EtherCAT : acontis EC-Master
Après 20 ans de développement, EC-Master a été porté sur de nombreux systèmes d'exploitation, architectures de processeurs et contrôleurs Ethernet. Au fil du temps, acontis a acquis une expertise approfondie de la technologie EtherCAT et des applications temps réel. Les utilisateurs d' EC-Master apprécient notamment la réactivité et les connaissances de l'équipe d'acontis en matière d’assistance technique et de recherche de nouvelles solutions aux problèmes rencontrés.
acontis EC-Master : architecture

acontis EC-Master : Qui maintient le logiciel ?
acontis EC-Master : Types et Modèles de licence
La pile EtherCAT : IgH EtherCAT Master® (EtherLab®)
IgH EtherCAT Master® : architecture

Un comportement singulier de cette pile maître EtherCAT que nous avons rencontré est que les données acycliques sont regroupées dans des trames cycliques. Cela a un certain effet sur le temps de cycle rencontré par certains équipements esclaves, en particulier lorsque le temps est pris à la réception complète de la trame.
IgH EtherCAT Master® : Qui maintient le logiciel ?
IgH EtherCAT Master® : Termes de la licence
Simple Open EtherCAT Master (SOEM)
Simple Open EtherCAT Master (SOEM) : architecture

Simple Open EtherCAT Master (SOEM) : Qui maintient le logiciel ?
Simple Open EtherCAT Master (SOEM) : Termes de la licence
Systèmes d'exploitation, architectures CPU et interfaces Ethernet supportés
Comme les trois piles sont disponibles sous forme de code source, il est en principe possible de les porter sur chaque système d'exploitation, architecture et interface réseau existantes avec plus ou moins d'efforts. Par conséquent, nous nous concentrerons uniquement sur ce qui est actuellement disponible. Étant donné qu'acontis propose déjà ces informations et que nous effectuons cette comparaison pour nos clients et clients potentiels, nous ne pouvons garantir l’exactitude de ces informations que pour la pile l'EC-Master. De plus, comme nous n'avons pas été en mesure de compiler chaque pile pour chaque système d'exploitation, architecture et adaptateur réseau, nous nous appuyons sur ce qui est indiqué dans la documentation et sur ce que nous voyons dans le code source.

x 1 quelqu'un l'a utilisé ou a essayé de l'utiliser dans un projet/quelques projets
x 2 en tant qu'application 32 bits sur Windows 64 bits
x 3 il existe du code
EC-Master prend en charge plus de 147 combinaisons différentes d'architectures de processeur, de systèmes d'exploitation et d'adaptateurs réseau. IgH EtherCAT Master® 21 et SOEM 7. 34 solutions pour Linux existent (26 par l'EC-Master et 8 Open Source). Il est important de noter le nombre de combinaisons disponibles pour EC-Master et la liste est encore incomplète. Une liste complète peut être trouvée sur la page des manuels de la pile. Il convient également de noter que SOEM est la seule pile qui prend en charge Erika Enterprise RTOS , un RTOS certifié OSEK/VDX pour l’automobile sans royalty.
Fonctionnalités maître EtherCAT prises en charge




Remplir le tableau ci-dessus était un défi pour les solutions open source car nous devions rechercher presque toutes les informations dans le code source lui-même. En effet, la documentation sur les fonctionnalités prises en charge n'est généralement pas disponible. La documentation IgH est plus complète que SOEM, cependant, la documentation acontis s'est avérée être la meilleure.
Si le champ IRQ des datagrammes EtherCAT n'est pas vérifié, les changements de topologie et d'état de l'esclave ne sont pas détectés immédiatement. Si votre application contient, par exemple, des modifications d'outils, cela peut vous inquiéter.
De nombreux fabricants d'esclaves définissent des commandes d'initialisation CoE obligatoires ("InitCmds") dans le fichier EtherCAT Slave Information (ESI) (EtherCAT Devices Description). Ces informations ne sont disponibles que dans le fichier ESI et ne peuvent pas être lues à partir de l'EEPROM de l'esclave car l'EEPROM ne contient généralement que des valeurs par défaut. Si les fichiers ESI ne peuvent pas être traités dans une ENI et lus par la pile, ces InitCmds doivent être implémentés manuellement pour que ces esclaves atteignent l'état opérationnel (OP) → pour chaque changement d'état pour chaque révision de ces esclaves. Cela peut être fastidieux. Veuillez-vous référer à l' annexe pour plus de détails.
Pour autant que nous puissions en juger, les deux piles open source n'ont pas de capacité d'importation ENI ni d'installations de communication esclave à esclave, par conséquent, elles ne prennent pas non plus en charge Safety over EtherCAT (FSoE = FailSafe over EtherCAT). S'il s'agit d'exigences actuelles ou futures pour votre projet, vous devez reconsidérer l'utilisation des piles open source.


Un rapport détaillé sur tous ces cas de test et leurs résultats peut être obtenu sur demande. Comme le montre le tableau, la gestion des erreurs dans IgH est légèrement meilleure que dans SOEM. Le plus grand domaine où les piles open source manquent de gestion des erreurs est lors du démarrage du réseau.
Conclusion
Annexe : extraits de code pour initialiser un variateur Yaskawa Sigma
Open source
{
int retval = 0;
uint8 ui8Val = 0;
uint16 ui16Val = 0;
uint32 ui32Val = 0;
ui8Val = 0;
retval += ec_SDOwrite(slave, 0x1c12, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
retval += ec_SDOwrite(slave, 0x1c13, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui8Val = 0;
retval += ec_SDOwrite(slave, 0x1a00, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
ui32Val = 0x60410010;
retval += ec_SDOwrite(slave, 0x1a00, 0x1, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1617166368;
retval += ec_SDOwrite(slave, 0x1a00, 0x2, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1618411536;
retval += ec_SDOwrite(slave, 0x1a00, 0x3, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1626603552;
retval += ec_SDOwrite(slave, 0x1a00, 0x4, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1616969736;
retval += ec_SDOwrite(slave, 0x1a00, 0x5, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 8;
retval += ec_SDOwrite(slave, 0x1a00, 0x6, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1622736312;
retval += ec_SDOwrite(slave, 0x1a00, 0x7, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1622802464;
retval += ec_SDOwrite(slave, 0x1a00, 0x8, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui8Val = 8;
retval += ec_SDOwrite(slave, 0x1a00, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui8Val = 0;
retval += ec_SDOwrite(slave, 0x1a01, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
ui32Val = 1614872592;
retval += ec_SDOwrite(slave, 0x1a01, 0x1, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1617166368;
retval += ec_SDOwrite(slave, 0x1a01, 0x2, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui8Val = 2;
retval += ec_SDOwrite(slave, 0x1a01, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui8Val = 0;
retval += ec_SDOwrite(slave, 0x1a02, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
ui32Val = 1614872592;
retval += ec_SDOwrite(slave, 0x1a02, 0x1, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1617166368;
retval += ec_SDOwrite(slave, 0x1a02, 0x2, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui8Val = 2;
retval += ec_SDOwrite(slave, 0x1a02, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui8Val = 0;
retval += ec_SDOwrite(slave, 0x1a03, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
ui32Val = 1614872592;
retval += ec_SDOwrite(slave, 0x1a03, 0x1, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1617166368;
retval += ec_SDOwrite(slave, 0x1a03, 0x2, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1618411536;
retval += ec_SDOwrite(slave, 0x1a03, 0x3, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui8Val = 3;
retval += ec_SDOwrite(slave, 0x1a03, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui8Val = 0;
retval += ec_SDOwrite(slave, 0x1600, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
ui32Val = 1614804056;
retval += ec_SDOwrite(slave, 0x1600, 0x1, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1618608160;
retval += ec_SDOwrite(slave, 0x1600, 0x2, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1627324448;
retval += ec_SDOwrite(slave, 0x1600, 0x3, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1618018320;
retval += ec_SDOwrite(slave, 0x1600, 0x4, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1618083856;
retval += ec_SDOwrite(slave, 0x1600, 0x5, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1616904200;
retval += ec_SDOwrite(slave, 0x1600, 0x6, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 8;
retval += ec_SDOwrite(slave, 0x1600, 0x7, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1622671376;
retval += ec_SDOwrite(slave, 0x1600, 0x8, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui8Val = 8;
retval += ec_SDOwrite(slave, 0x1600, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui8Val = 0;
retval += ec_SDOwrite(slave, 0x1601, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
ui32Val = 1614807056;
retval += ec_SDOwrite(slave, 0x1601, 0x1, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1618608160;
retval += ec_SDOwrite(slave, 0x1601, 0x2, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui8Val = 2;
retval += ec_SDOwrite(slave, 0x1601, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui8Val = 0;
retval += ec_SDOwrite(slave, 0x1602, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
ui32Val = 1614807056;
retval += ec_SDOwrite(slave, 0x1602, 0x1, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1627324448;
retval += ec_SDOwrite(slave, 0x1602, 0x2, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui8Val = 2;
retval += ec_SDOwrite(slave, 0x1602, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui8Val = 0;
retval += ec_SDOwrite(slave, 0x1603, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
ui32Val = 1614807056;
retval += ec_SDOwrite(slave, 0x1603, 0x1, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui32Val = 1618018320;
retval += ec_SDOwrite(slave, 0x1603, 0x2, FALSE, sizeof(ui32Val), &ui32Val, EC_TIMEOUTSAFE);
ui8Val = 2;
retval += ec_SDOwrite(slave, 0x1603, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui16Val = 5633;
retval += ec_SDOwrite(slave, 0x1c12, 0x1, FALSE, sizeof(ui16Val), &ui16Val, EC_TIMEOUTSAFE);
ui8Val = 1;
retval += ec_SDOwrite(slave, 0x1c12, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui16Val = 6657;
retval += ec_SDOwrite(slave, 0x1c13, 0x1, FALSE, sizeof(ui16Val), &ui16Val, EC_TIMEOUTSAFE);
ui8Val = 1;
retval += ec_SDOwrite(slave, 0x1c13, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
ui8Val = 8;
retval += ec_SDOwrite(slave, 0x6060, 0x0, FALSE, sizeof(ui8Val), &ui8Val, EC_TIMEOUTSAFE);
while(EcatError) printf("%s", ec_elist2string());
printf("Servo slave %d set, retval = %d\n", slave, retval);
return 1;
}
EC-Master
EC_T_INIT_MASTER_PARMS oInitParms;
OsMemset(&oInitParms, 0, sizeof(EC_T_INIT_MASTER_PARMS));
oInitParms.dwSignature = ATECAT_SIGNATURE;
oInitParms.dwSize = sizeof(EC_T_INIT_MASTER_PARMS);
oInitParms.pLinkParms = pAppParms->apLinkParms[0];
oInitParms.dwBusCycleTimeUsec = pAppParms->dwBusCycleTimeUsec;
oInitParms.dwMaxAcycFramesQueued = MASTER_CFG_MAX_ACYC_FRAMES_QUEUED;
OsMemcpy(&oInitParms.LogParms, &pAppContext->LogParms, sizeof(EC_T_LOG_PARMS));
oInitParms.LogParms.dwLogLevel = pAppParms->dwMasterLogLevel;
CHECK_MASTER_CALL( ecatInitMaster(&oInitParms), "Cannot initialize EC-Master: %s (0x%lx))\n" );
/* create cyclic task to trigger jobs */
CREATE_CYCLIC_TASK_TO_TRIGGER_JOBS
/* configure master */
CHECK_MASTER_CALL( ecatConfigureMaster(pAppParms->eCnfType,
"YaskawaSigmaDrive.xml",
(EC_T_DWORD)OsStrlen("YaskawaSigmaDrive.xml")),
"Cannot configure EC-Master: %s (0x%lx))\n" );
/* register client */
CHECK_MASTER_CALL( ecatRegisterClient(EcMasterNotifyCallback, pAppContext, &RegisterClientResults), "ERROR: Cannot register client: %s (0x%lx))\n" );
pAppContext->pNotificationHandler->SetClientID(RegisterClientResults.dwClntId);
/* state transition to OP */
CHECK_STATE_TRANSITION( ecatSetMasterState(ETHERCAT_STATE_CHANGE_TIMEOUT, eEcatState_INIT), "INIT" );
CHECK_STATE_TRANSITION( ecatSetMasterState(ETHERCAT_STATE_CHANGE_TIMEOUT, eEcatState_PREOP), "PREOP" );
CHECK_STATE_TRANSITION( ecatSetMasterState(ETHERCAT_STATE_CHANGE_TIMEOUT, eEcatState_SAFEOP), "SAFEOP" );
CHECK_STATE_TRANSITION( ecatSetMasterState(ETHERCAT_STATE_CHANGE_TIMEOUT, eEcatState_OP), "OP" );

Ces articles peuvent vous intéresser
EtherCAT : introduction de la technologie
Une lecture incontournable, proposée par acontis, pour tous ceux qui cherchent à approfondir leur compréhension de cette technologie de plus en plus populaire.

EtherCAT : le choix de la performance pour l’Ethernet Industriel
Nos experts vous dresse un aperçu complet du réseau EtherCAT (Ethernet for Control Automation Technology).
Comment résoudre les problèmes sur un réseau EtherCAT® ?
Les possibilités de diagnostic et résolution de pannes jouent un rôle majeur dans la disponibilité et les temps de mise en service d'une installation EtherCAT®...

Safety-over-EtherCAT : Comment sécuriser votre plateforme EtherCAT
Découvrez le Safety-over-EtherCAT (FSoE).
Mise en Œuvre du Réseau EtherCAT
WEBINAR à la demande: Configurez et mettez en œuvre votre réseau en un rien de temps !

Quel EtherCAT pour quelle application ?
Webinar à la demande : Vous avez des questions ou des projets relatifs à la technologie EtherCAT ? Découvrez toutes les nuances en visionnant cette session.
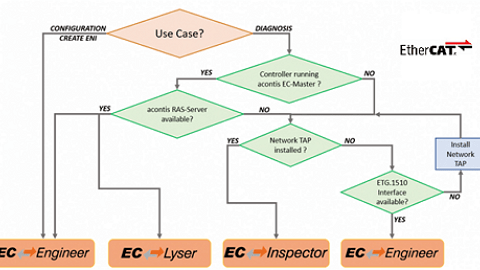
Quel outil de surveillance et de diagnostic EtherCAT choisir?
Acontis propose plusieurs outils de surveillance et de diagnostic des réseaux EtherCAT. Cet article montre les fonctionnalités et les différences entre les outils et vous aidera à décider quel outil est nécessaire pour quel cas d'utilisation.